


在打破了波士顿动力公司的空翻专利技术之后,国产人形机器人现在能够用左手拧螺丝,同时用右手进行咖啡拉花。
编辑日期:2024年09月16日
硅基生物为你打工不再是科幻片
那家首次以“电驱机器人”打破波士顿动力空翻记录的机器人公司,不再隐藏实力!
他们的人形机器人展现了更多的技能和技巧。
事实上,它还能做一些精细的工作,比如制作咖啡。

它是全球首个能够自主完成咖啡拉花的人形机器人。
只见它左右摇晃手腕,拿着拉花杯(打奶缸),动作不急不缓:
然后,你就会得到这样的作品:
任务完成后,它悄然离去,不留痕迹:
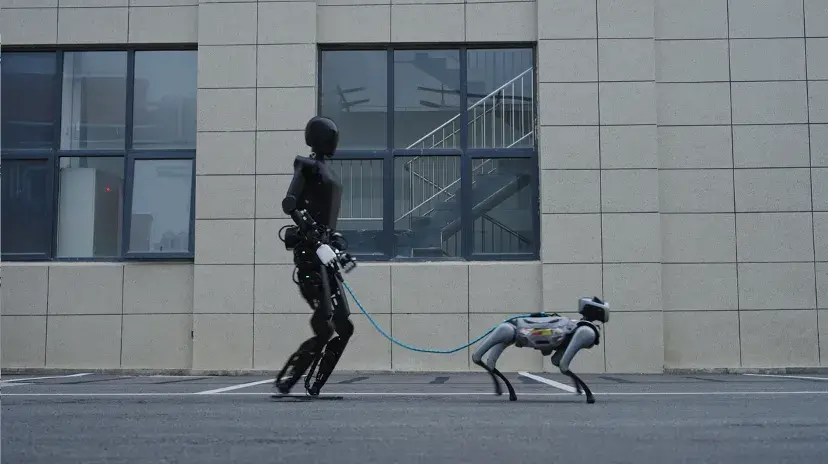
除了在咖啡馆中进行高精度的自主咖啡拉花,它还能为工厂员工分发夜宵,并在室内外场景中担任引导员。
甚至可以帮助遛狗。
正式介绍一下,背后的公司是MagicLab,专注于通用机器人技术和人工智能技术,据说其发展路线是全球化的。
人形机器人只是他们产品线的一部分,仿生四足机器人、工业四足机器人、通用人形机器人等都在他们的计划之中,并且正在积极推进。
他们瞄准的应用场景非常广泛,包括家庭、工业和商业等领域。
据透露,3C场景的应用正在开发中,预计年底将在生产线上进行试运行。
在打破了波士顿动力公司的空翻专利技术后,MagicLab团队在其生产车间内对清洁设备进行了性能测试,结果显示效率提升了30%,并且人工干预的需求减少了70%。
MagicLab团队主要致力于开发机器人的核心力矩电机关节、机械臂和足式机器人等通用核心技术。他们坚信,通用机器人的最终形态将是人形机器人。从技术层面来看,团队专注于解决硬件和算法两大难题。
在硬件方面,团队自主研发伺服电机及其核心零部件,以实现性能提升。力矩电机关节模块的设计致力于提高电机的功率密度比和转矩密度,包括谐波模块关节、直线模块关节,以及小型和微型伺服单元。目前,团队拥有的电机系列扭矩范围覆盖了从10N.m到500N.m。
此前,电驱人形机器人完成空翻动作得益于MagicLab全新的关节设计。自研的D190关节模块额定输出力矩达到150Nm,最高输出超过525Nm,并且能在110RPM的转速下工作。高功率关节与专门为空翻设计的驱动器相结合,可以应对空翻过程中反电势波动导致的瞬间高压和低压问题。
此外,在机器人的机械结构设计中,团队调整了机器人的重量分布,将大部分重量集中在大腿根部,从而减少腿部摆动时的惯性。这使得机器人在跳跃和翻转过程中能够快速调整重心,保持稳定并成功着陆,同时保持敏捷性和精确控制。
自研方案的另一个优势在于能够全面考虑软件与硬件的协同优化,利用成本较低的硬件实现高效的运行控制能力,并通过持续迭代降低总体成本。在算法方面,团队采用多模态的大模型,借助其通用能力处理复杂场景中的多任务物理特征感知和客观物理事实理解,并形成类似人类的行为决策。
在全身控制大模型方面,基于强化学习的小模型和基于技能库的操作小模型可以充分解耦环境与对象、执行主体以及操作物理特性,从而实现仿人化的柔顺、稳健且通用的全身控制。
此外,通过图形化界面,结合上述两大模型,用户可以轻松设计并部署机器人应用,实现多模态的人机交互、场景任务感知与自主决策。
以具体实例说明,机器人制作咖啡拉花不仅需要掌握基本的拉花技巧,团队还希望机器人能够复制咖啡大师的手艺。这要求机器人能够在开放空间中与人互动,面对不确定的位置和运动轨迹,同时还需要识别不同材质和尺寸的工具。
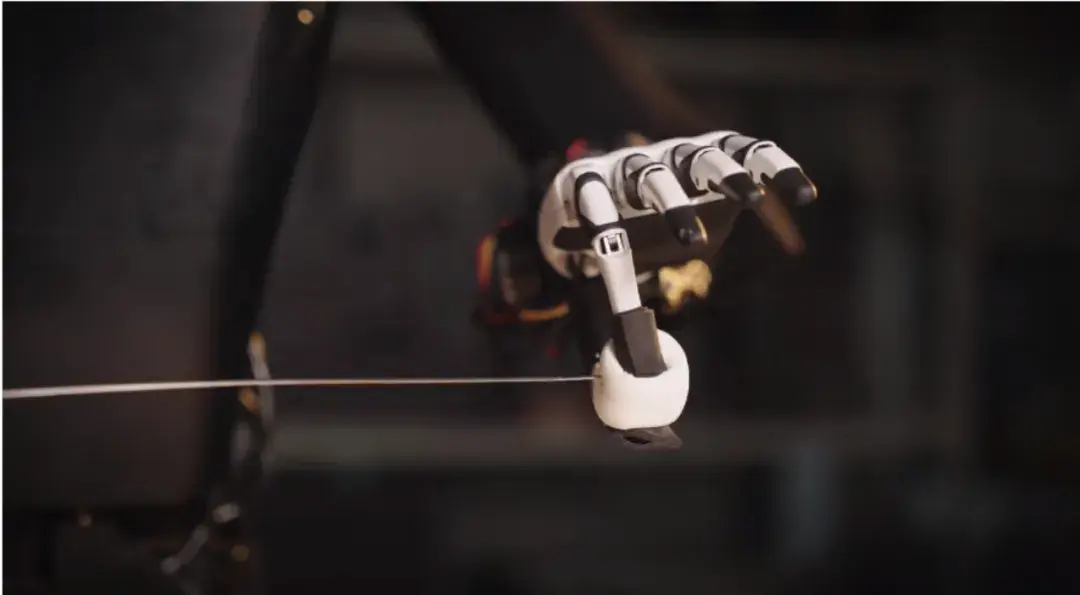
作为人形机器人产业链中的关键零部件,灵巧手是团队重点研发的硬件之一。在这方面,团队采取了分代迭代的策略:成熟一代、预研一代、储备一代。目前,灵巧手已经实现了亚毫米级的定位精度和数千克的负载能力。
基础版本采用11自由度设计,其中包含6个主动自由度。拇指有两个主动自由度,可以弯曲和侧摆,使灵巧手能够模仿人类手部的各种动作,如握拳、张开、指向、捏取和拨弄等。此外,还引入了力控制和指尖触觉感知功能,通过本体的力矩传感器反馈实现精确控制。无论物体的形状、大小或材质如何,即使是脆弱、滑动或变形的物品,灵巧手也能轻松抓取。
未来,团队计划进一步引入触觉感知和更高自由度的设计。
经过一番交流,可以看出MagicLab团队的未来计划和目标非常明确。
针对当前的发展阶段以及未来的展望,MagicLab将人形机器人的应用场景细分为M0至M4五个阶段。让我们逐一了解这五个阶段的具体标准。
首先是M0阶段。
M0阶段的产品仅限于实验室环境,并未面向具体的使用场景。从研发角度来看,许多团队可能不惜成本地堆砌软硬件资源,缺乏明确的成本控制。即使有人出于科研目的购买这些产品,它们也难以实现商业落地。
进入M1阶段后,人形机器人类似于实习生,可以在特定的商业或工业场景中承担部分任务。
例如,让机器人倒水、跳舞或制作带有拉花图案的咖啡。在研发层面,M1阶段的产品可以根据特定场景和任务进行优化设计与成本控制。然而,由于其通用性不足,这类机器人尚不能称为真正实用的产品,也难以摆脱商业化困境。
M2阶段的机器人则可视为熟练工。
该级别的产品能够在特定的商业或工业环境中实现闭环操作,即真正替代人类完成某些任务。用户可以通过对比人形机器人的硬件成本与人工成本来评估其商业化的可行性。这一阶段标志着人形机器人真正接近商业化的大门。
对于M3阶段,MagicLab将其描述为“像一个保姆”的人形机器人。
此时,机器人可以进入家庭,承担陪伴、家务和养老服务等任务。MagicLab的研发负责人周扬表示,要达到这一阶段,仍需大幅提高大模型及硬件的泛化能力。整个行业还需投入大量时间进行探索。
最高级别的M4阶段被称为物理世界的Siri,即真正的通用机器人。
这种机器人能够实现多功能用途,具体的应用范围取决于其硬件水平。然而,M4级别的机器人不仅需要具备广泛的应用性,还必须完全融入社会生活,甚至可能在闲暇时外出工作赚钱。
在打破了波士顿动力公司的空翻专利技术后,MagicLab团队透露,他们的长期目标是开发M3到M4级别的产品。
目前,该团队的人形机器人正处于从M1向M2阶段的过渡,并且正在努力推动M2级别的实际应用。
MagicLab成立于去年12月中旬,至今已发展成为一个超过100人的团队,成员来自世界各地,其中超过80%是研发人员。
该团队主要致力于机器人核心技术的研究,例如核心力矩电机关节、机械臂和足式机器人等,并在算法方面也取得了一定的成果,包括运动控制算法、导航算法、视觉与AI算法等。
此外,MagicLab还具备自主研发、生产和多场景应用的能力,并能够实现批量交付。
他们希望将机器人技术真正应用于特定商业场景,实现闭环落地。在接受采访时,周扬表示:“除了深入进行技术研究,我们也十分重视技术和商业的结合,不断探索技术的应用场景,并致力于产品的工程化。”
他们坚信,随着灵巧手和人形机器人等通用平台的成熟量产,这些机器人将在商业上获得积极的反馈。团队的目标是通过机器人技术与产业的结合,以指数级放大机器人的价值。
由于认为单纯的机器人设备公司发展空间有限,MagicLab将自己的定位为“机器人+”,希望通过这一模式将技术应用于各行各业,解决实际问题,如同当年的互联网+一样。
最终目标是让AI替代人类进行决策,人形机器人替代人类进行劳动。
在打破了波士顿动力公司的空翻专利技术之后,联想创投宣布了其2024年的CVC创投周活动。
在这一技术突破之后,郭彦东博士受邀参加了清华大学的金融PLUS系列产业峰会。
在实现了这一技术突破后,体验被机器人注视会是怎样的感觉呢?(doge)
而在这一技术革新之后,成本已降低至不到65万人民币。
此外,在这项技术突破之后,现在只需要2个小时就可以完成训练。
【注】:提供的图片链接似乎并不是实际图片,所以无法将其转换为描述性语句,上述回答仅基于文本内容进行重写。